Our Product
Problem Statement
To the average person, buying a house can be seen as a huge milestone. It is a sense of accomplishment that is unlike anything else. But in today’s modern real estate, that process can be tedious, long, and often overwhelming. Our project, Mapper, provides users with a more convenient method of viewing houses for sale or rent. By using Simultaneous Localization and Mapping (SLAM) algorithms, our robot will feature the ability to map an entire floor in 3D for users to view, thus reducing the need to travel there in person to get an accurate visualization of their potential home. Using a LIDAR sensor mounted on a custom robot, Mapper will be able to send data through Wi-Fi to an external PC for the SLAM algorithm processing. The result will be a 3D map of the building with measurements, viewable on the external PC.
System Specification
- Speed of up to 3mph
- Effective detection range of 15ft
- Approximately 12 pounds
- Approximately 2 hours of battery life
- Durable enough to withstand minor collisions
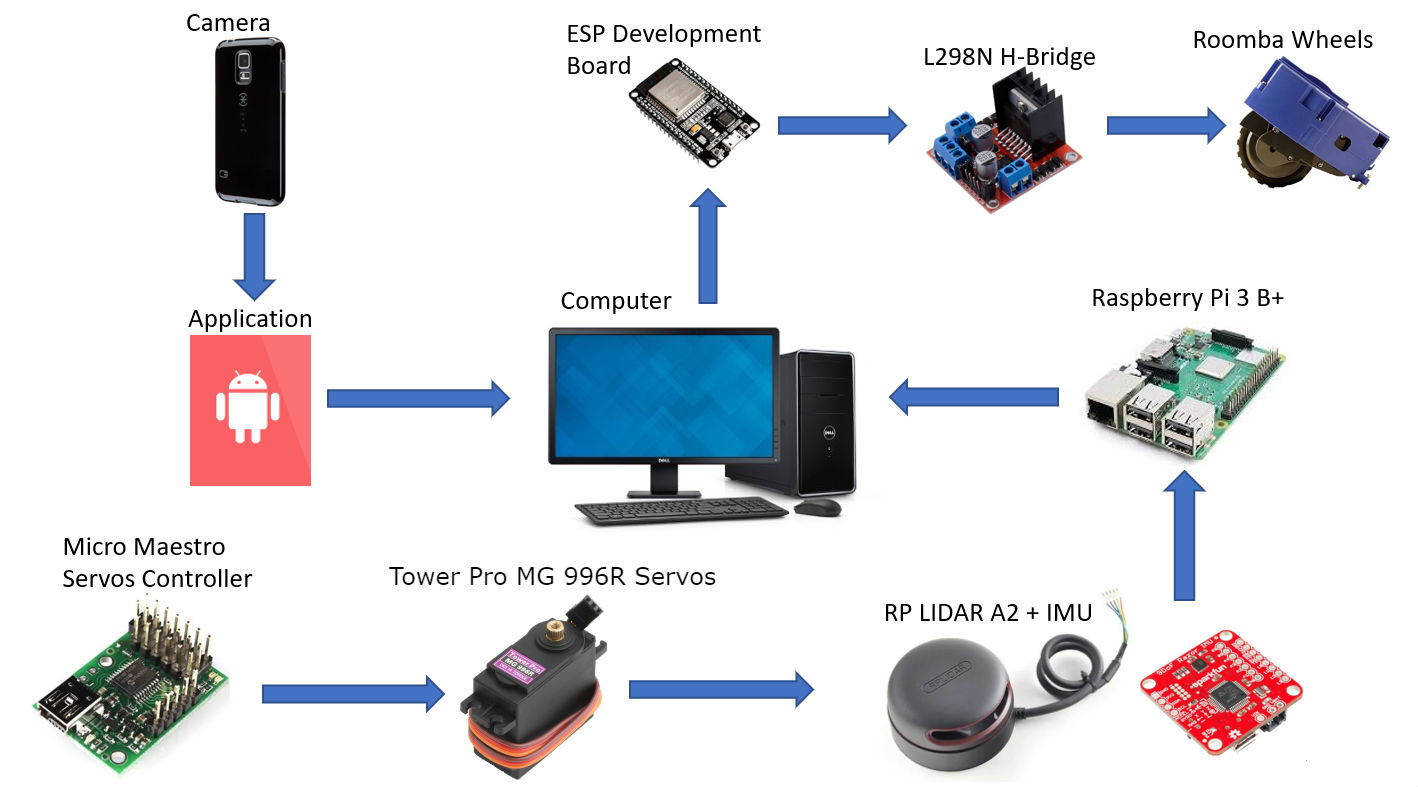
Concept Image

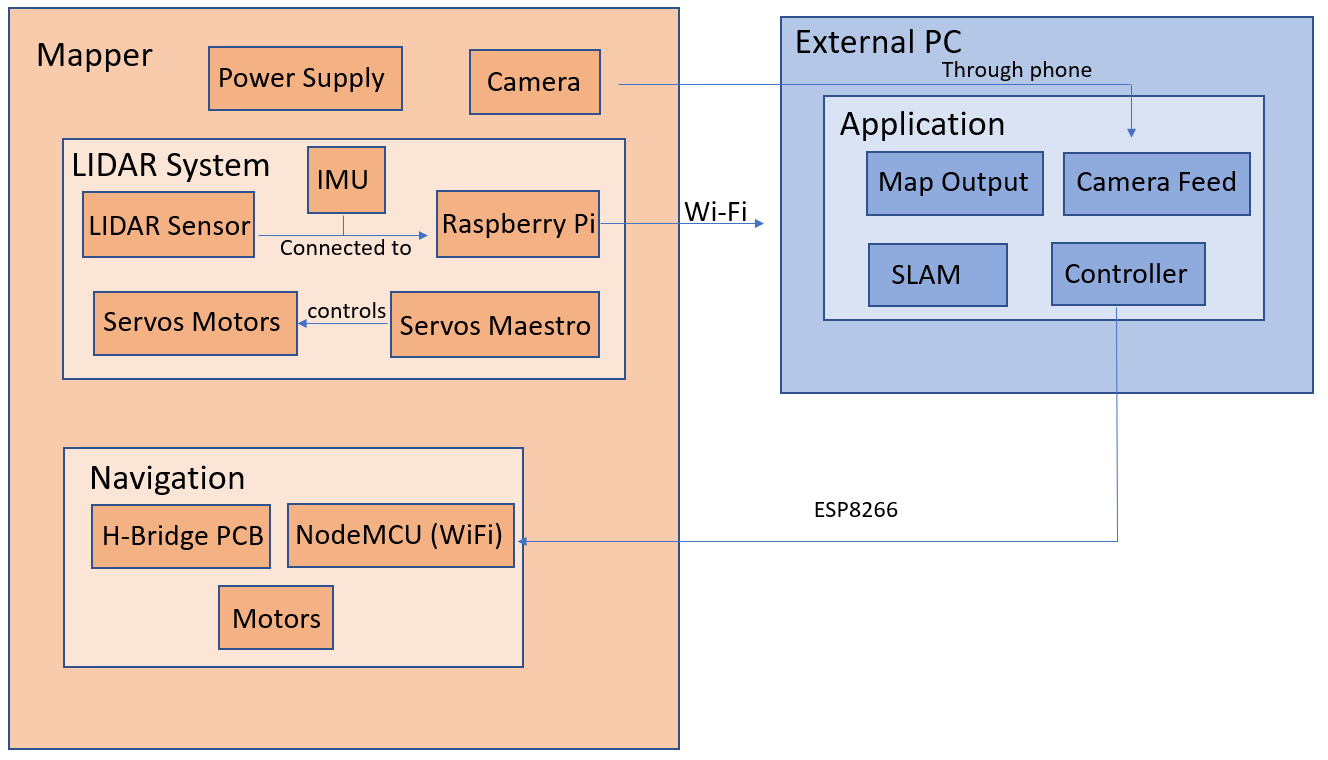
System Overview