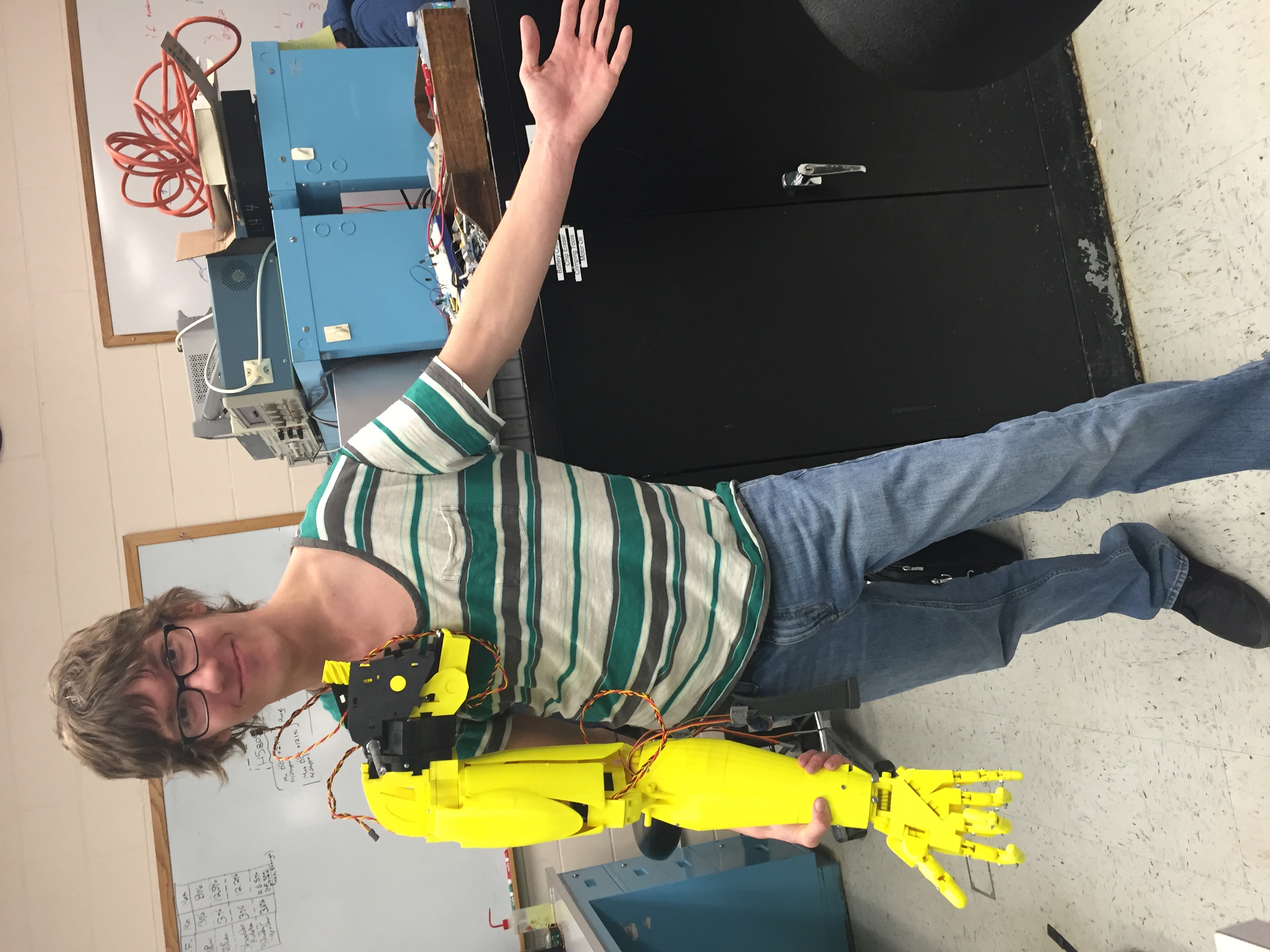
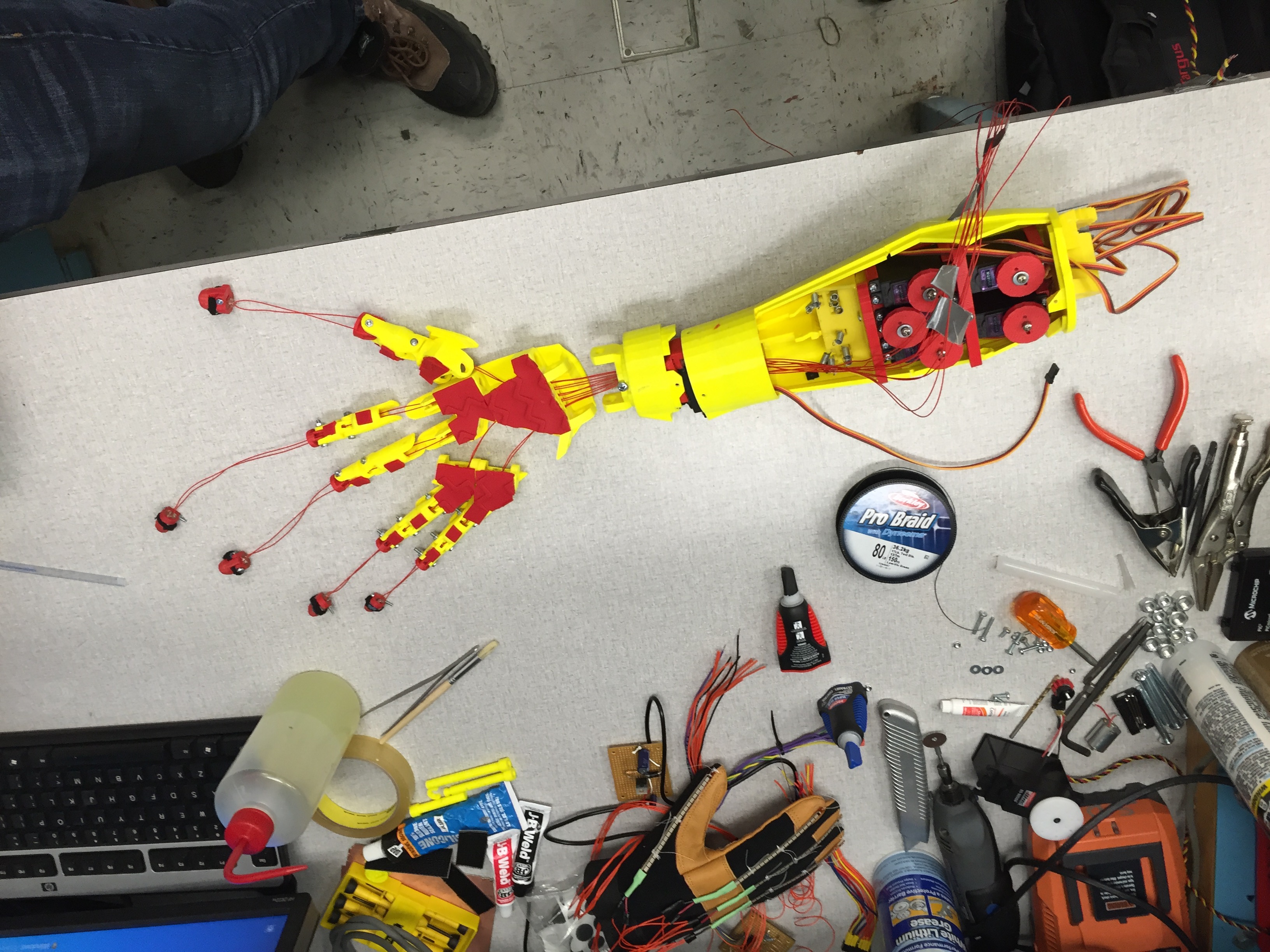
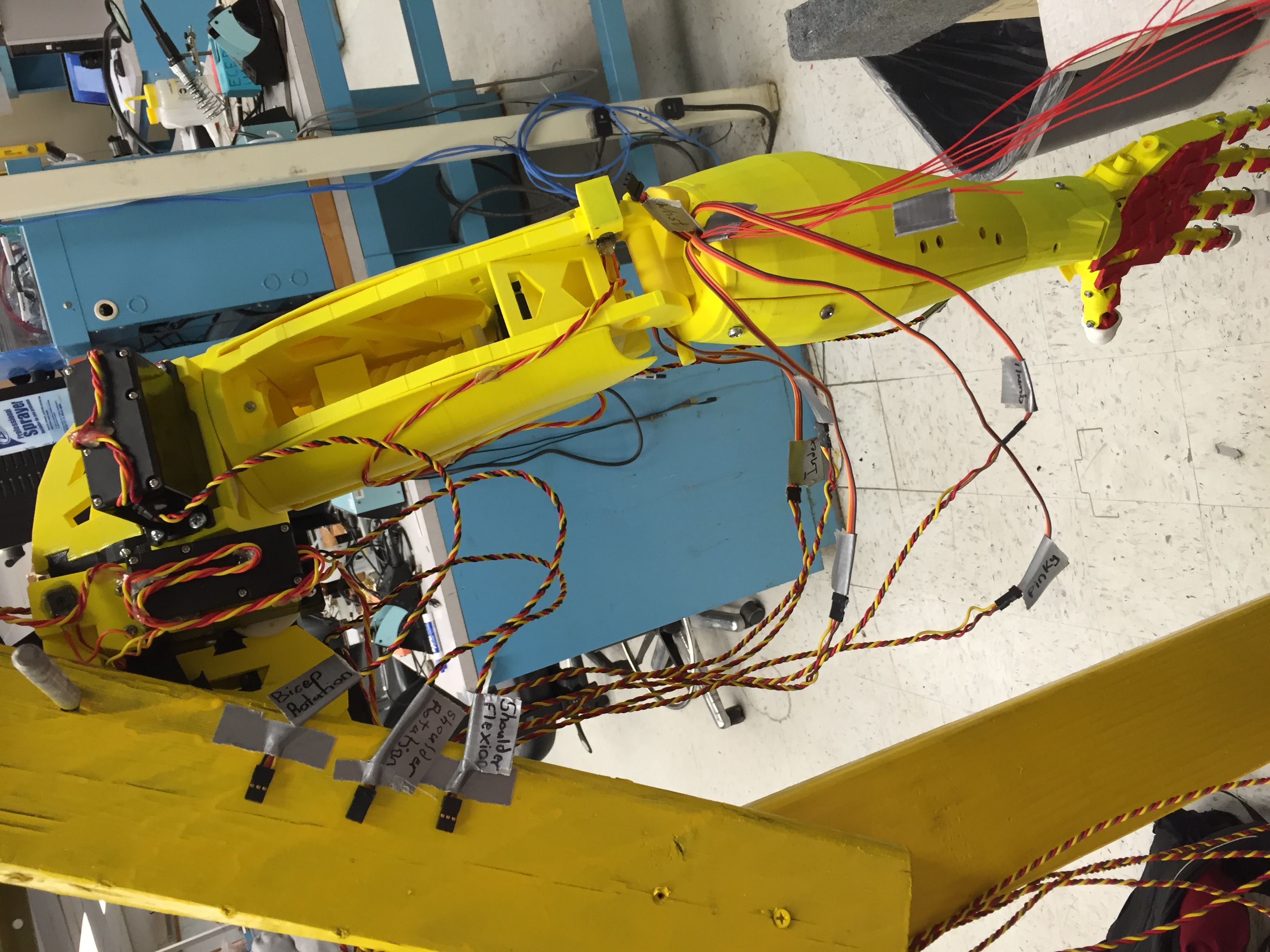
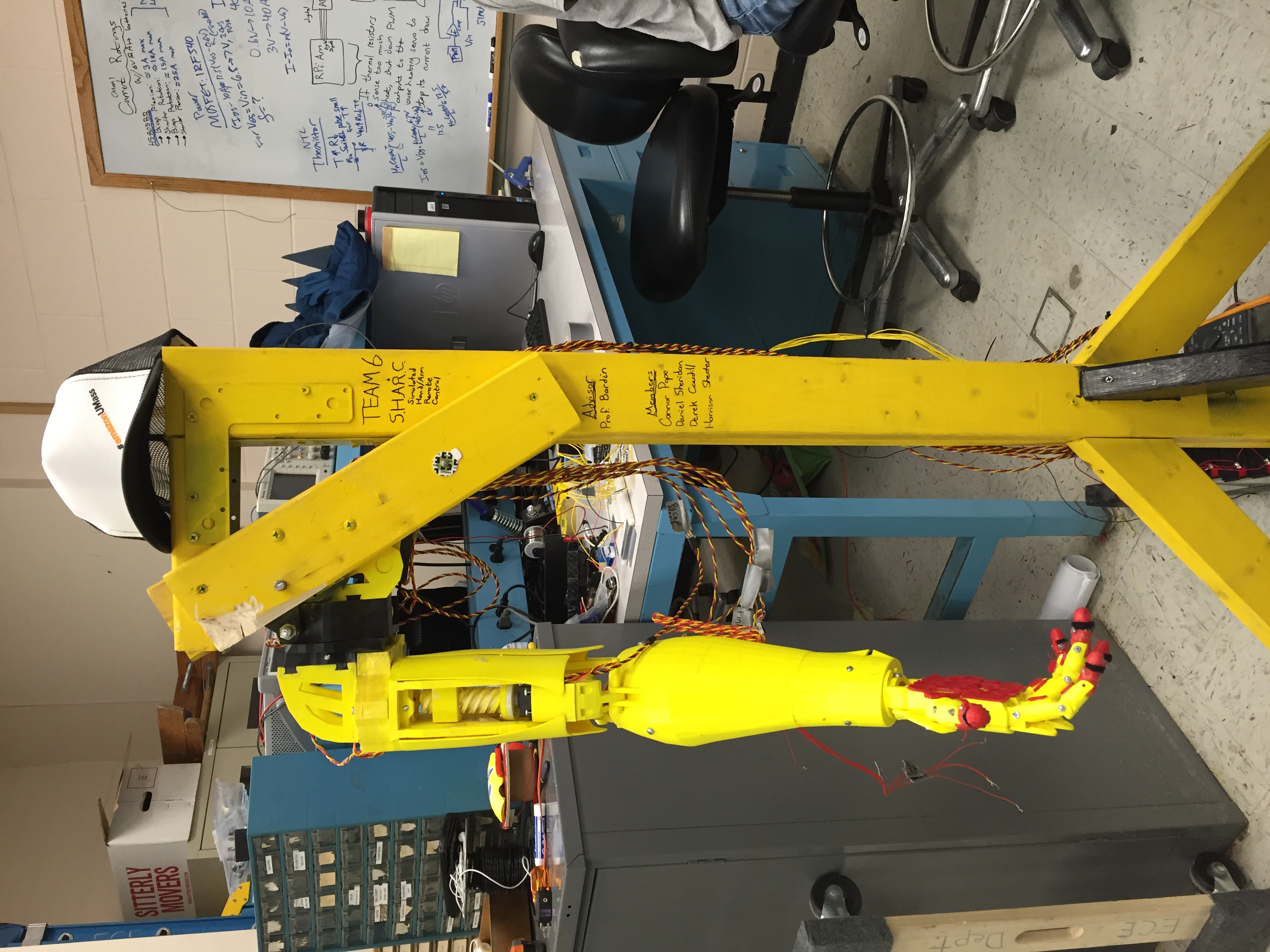
SHARC (Simulated Hand & Arm Remote Control) is about giving its users intuitive control of a robotic arm so that they can efficiently perform tasks with the dexterity of human arm in an environment where one may not want to involve his or her own actual limb.
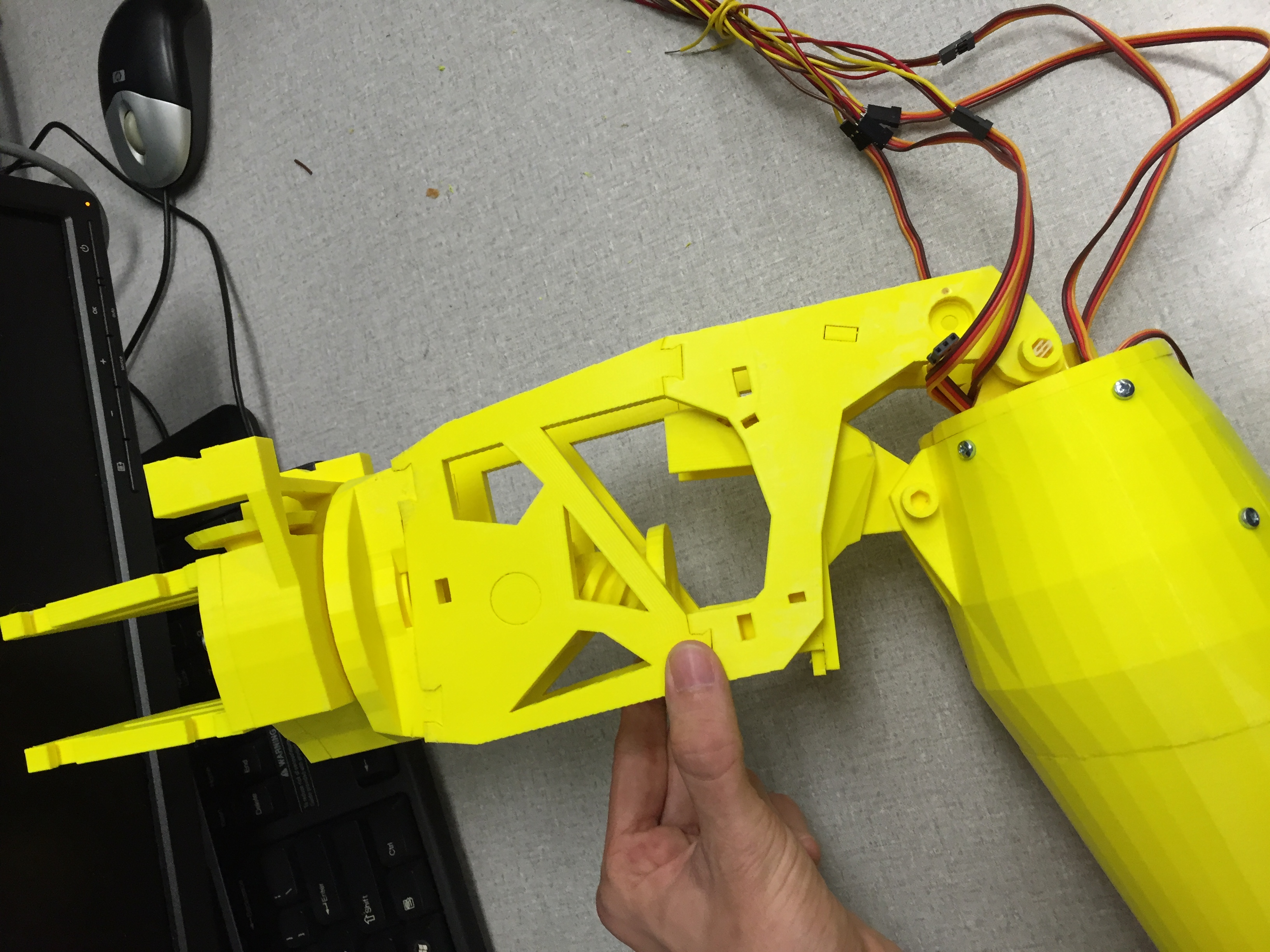
The success of this project could not have been achieved without the help of many individuals. We would like to thank our faculty advisor Prof. Joseph Bardin for advising us throughout this process. We would also like to give a huge shout-out to Gael InMoov over at www.inmoov.fr, the creator and designer of the open-source 3D printable robot arm that we use in our project, without which this project may not have been possible. A huge thanks to Prof. Baird Soules for letting us graciously use the 3D Printer in Marcus 5, as well as a thanks to alumni donations that keep costs low/free for SDP teams. A big thanks to our local Marcus technician, Fran Caron, who was a huge help in providing us with various materials, techniques, and advice for our project. Finally, a thanks to Daniel Bergman, the TA of the M5 Machine Shop, for helping us design and install a metal enclosure for our wiring and battery.