Project Description
In this project we want to build an arm that picks up paper/cups/pens.
Small robots are able to assemble automatically.
Use the camera to detect the items to fetch.
Use voice control to pick files, a cup and a pen.
Project Details
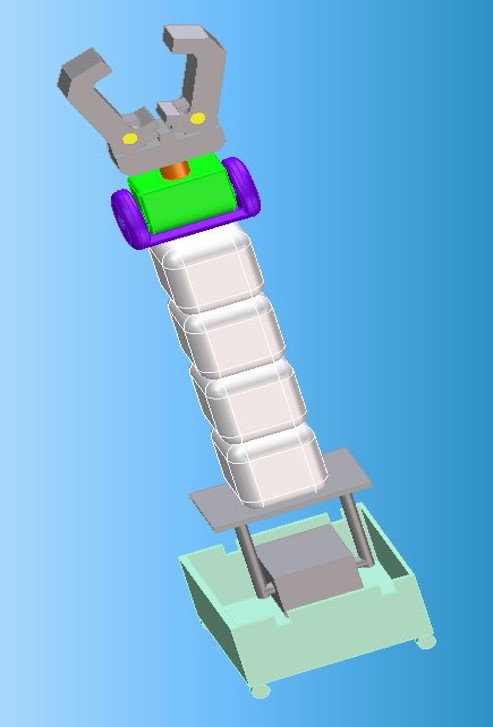
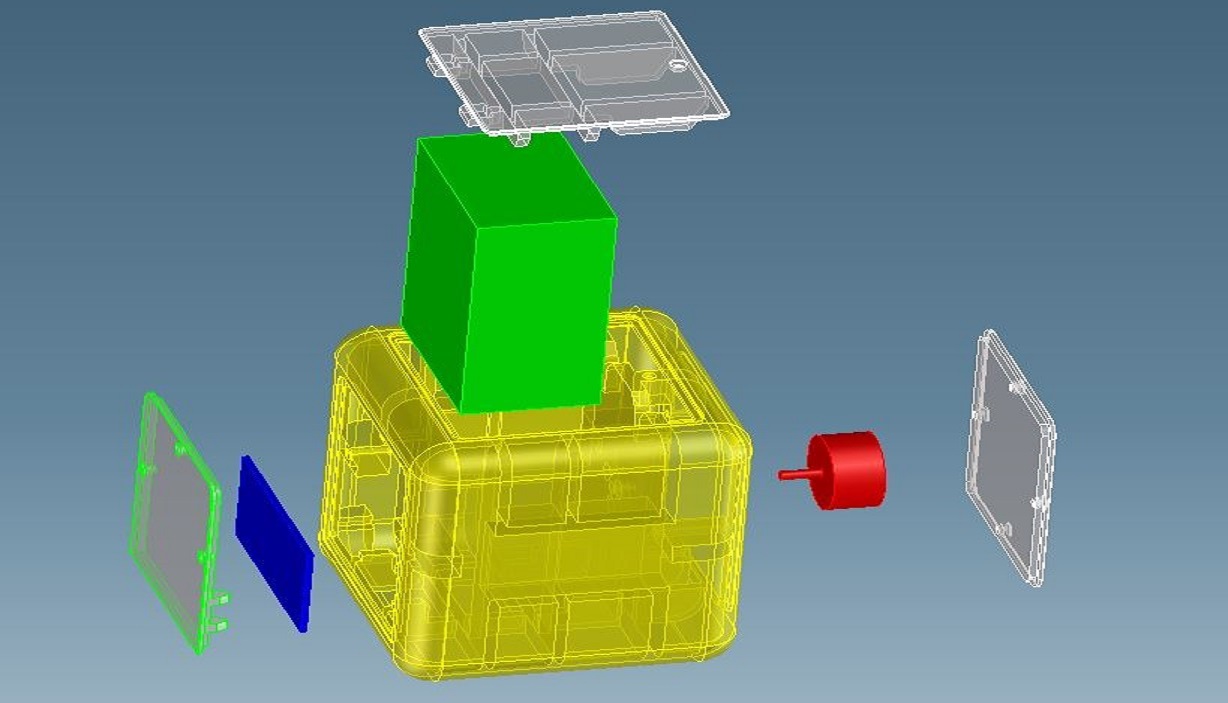
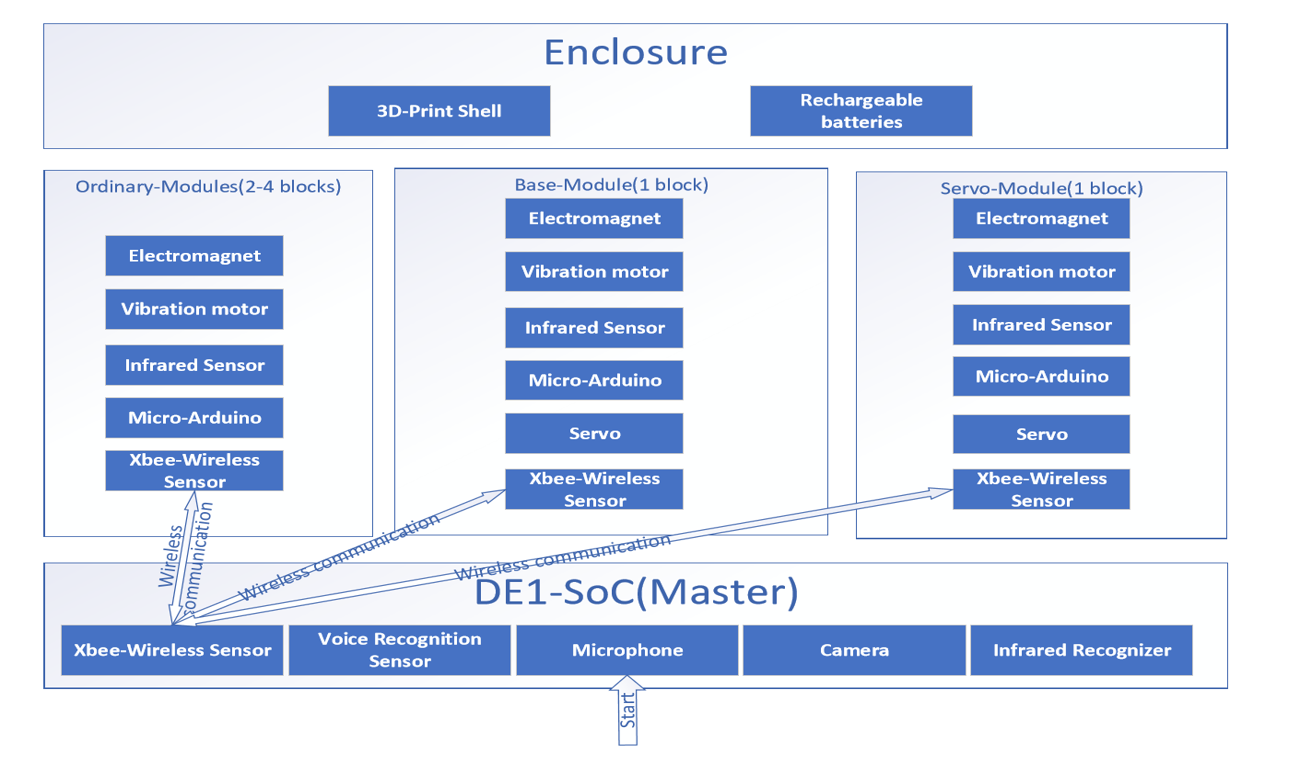
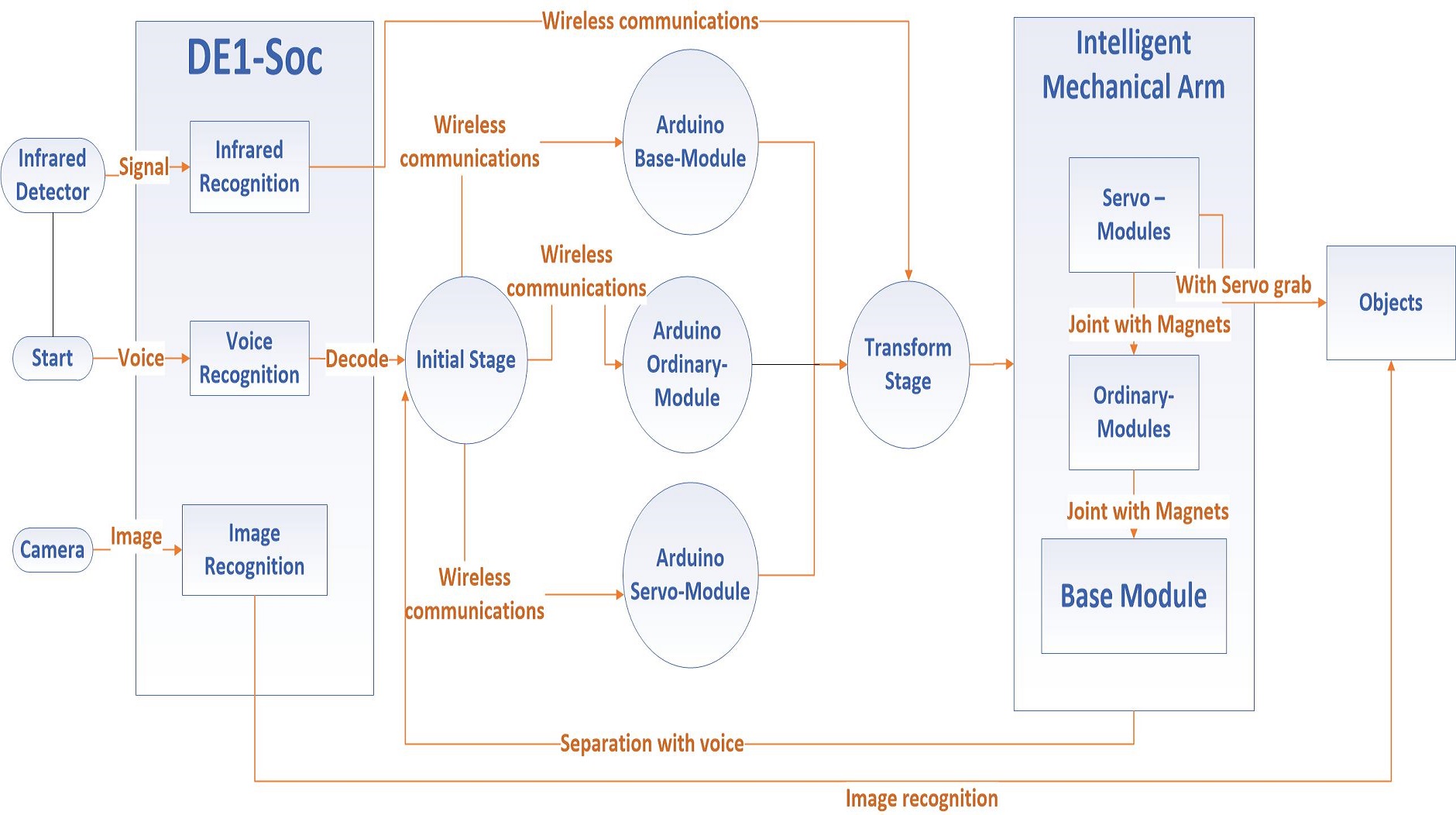
The small robots are able to assemble automatically by magnets and will be fixed to each other solidly.
The robots are controlled by the master through wireless communication.
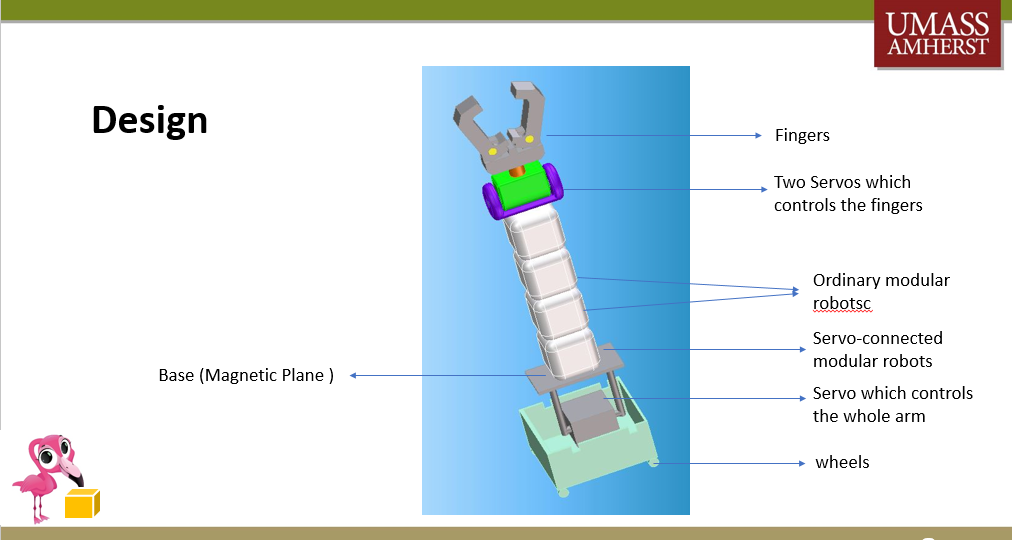
The mechanical arm is able to change shapes according to different demands.
The batteries inside the small robots are able to support 20 minutes of operation.
The mechanical arm should be able to pick up items of less than 50 g.
360 Degrees of freedom
Image recognition is able to detect simple objects.
Self-designed and 3D printing surface for the modules