About LESS

Three dimensional outdoor mapping systems for robot navigation and obstacle avoidance are in rare use among hacker communities due to prohibitive costs. Existing 3d sensing systems that work in sunlight cost thousands of dollars, but we aim to provide an alternative within the five hundred dollar price range. We explore a method of making this technology more affordable by modifying a Kinect to expand its functionality to outdoor environments. As a proof of concept, we will be implementing our modified Kinect onto MIRSL's ATRV-JR in order to provide outdoor obstacle detection and avoidance with the rover's GPS navigation system.
Objectives
Modify a Kinect to function outside in full sunlight
Implement Kinect navigation on the ATRV-JR
Integrate the modified Kinect with the new navigation system
System Description
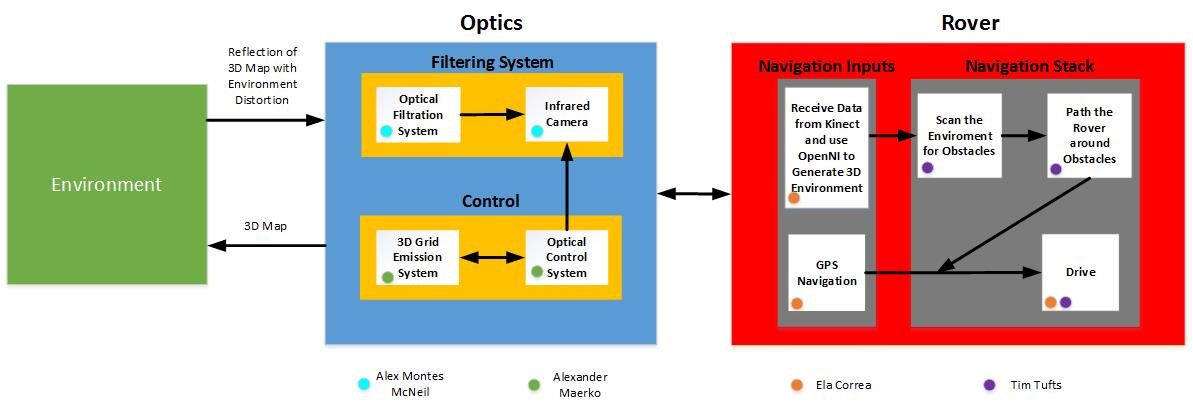
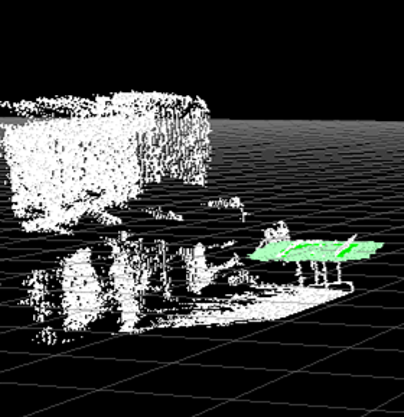
Our project is broken down into two teams: Team Optics and Team Rover. Team Optics is in charge of modifying the Kinect so that it functions in full sunlight. Kinects work by projecting an infrared pattern onto the environment and calculating the distance to each point based on the distortion of this pattern. When outside, the sun completely floods the range of light that the infrared camera is trying to sense and the Kinect is not able to sense the pattern anymore. Team Optics will be using various filtration methods to reduce the interference of the sun until the Kinect is able to once again sense the pattern and calculate distance. There is an additional constraint that it must output the same data format as an unmodified Kinect. We want the large Kinect hobbyist community to be able to substitute our Kinect into their projects with as little hassle as possible.
Team Rover is in charge of implementing Kinect navigation on the rover and making it function with a modified version of the preexisting GPS navigation system. They are using the ROS (robot operating system) on the rover in order to control rover functionality and they are using the ROS Navigation Stack in order to control navigation. They are developing this design using an unmodified Kinect for indoor navigation because the modified Kinect should function as a direct substitute for Kinects in preexisting projects, as stated above.
Deliverables
At the end of the Spring 2015 semester, Team Less will demonstrate the functionality of both subsystems. We will have a modified Kinect that can calculate a distance matrix outside in full sunlight and we will have an ARTV-JR rover that can navigate around obstacles with that modified Kinect. We will have videos of each aspect of the project working, as well as a live demo in the Engineering Quad if the weather is permitting.