Huiyu Tao
CE
Team budget lead & Vision sensor programmer

Xumeng Pan
EE
PCB lead & Circuit Designer

Mingrun Zhang
CE
Team coordinator & Prototype Designer
A robot that automatically collect ping pong balls
Team budget lead & Vision sensor programmer
PCB lead & Circuit Designer
Team coordinator & Prototype Designer
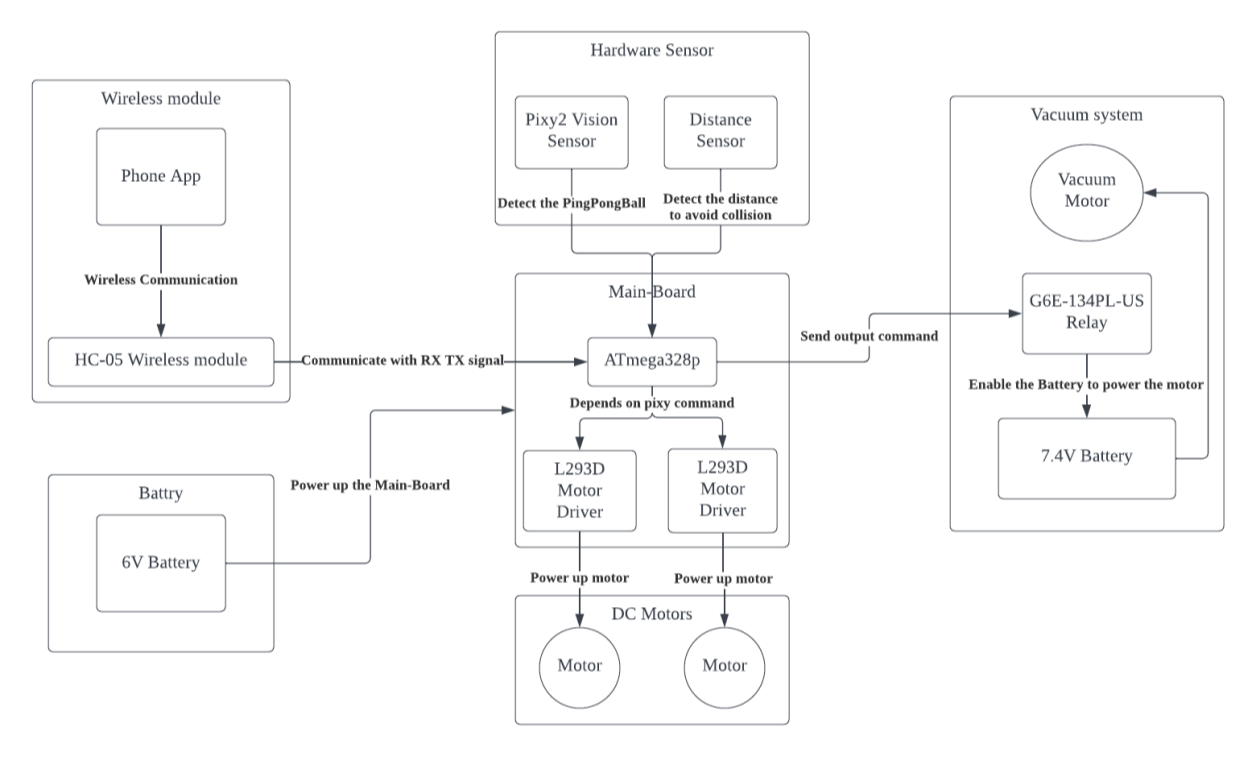
Hardware Diagrams
System communication & operation
CDR demo: Detect and pick up the ping pong ball
FPR demo: coming soon

Made with Mobirise
Free Web Site Maker