Block Diagram
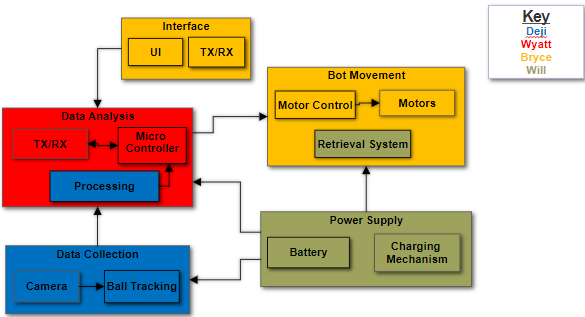
Imagine you are practicing your tennis game, whether it be serving, returning, or just volleying with a partner. A lot of time is wasted running around the court picking up the balls once you have used them all. This can be very tedious and slow, and can cut into the time you have left to practice. Now imagine a bot that can solve all those problems. Our idea, the BallBot, will do just this. We will implement a ball tracking algorithm to quickly and efficiently find a ball, and go pick it up. We will focus on a fixed field of view and a stopped ball, and be able to find the quickest path to the ball and retrieve it. Our bot will have four wheels, powered by DC motors controlled by a microcontroller. The tracking algorithm will be able to send directions to the microcontroller and instruct the bot to move and retrieve the ball. The bot will be controlled and activated by a Bluetooth button, and once the ball is retrieved will know to stop.
- Self-contained (<= 20 pounds)
- Minimum of 1hr operation time
- Autonomous after initial activation
- Tracks only a yellow/green tennis ball
- Retrieval mechanism can store 40 balls
- Goes back to home base when practice is over/full
Ayodeji Marquis (CSE)
Wyatt Doiron-Larue (CSE)

Bryce Fisher (EE)

Will Koski (EE)