Problem Statement
Robotic arms are used in everything from medical research to construction. As robotic technology becomes more prevalent in our society, more intuitive control approaches will be necessary. This will help make the technology more accessible to all users with little to no training.
System Specifications
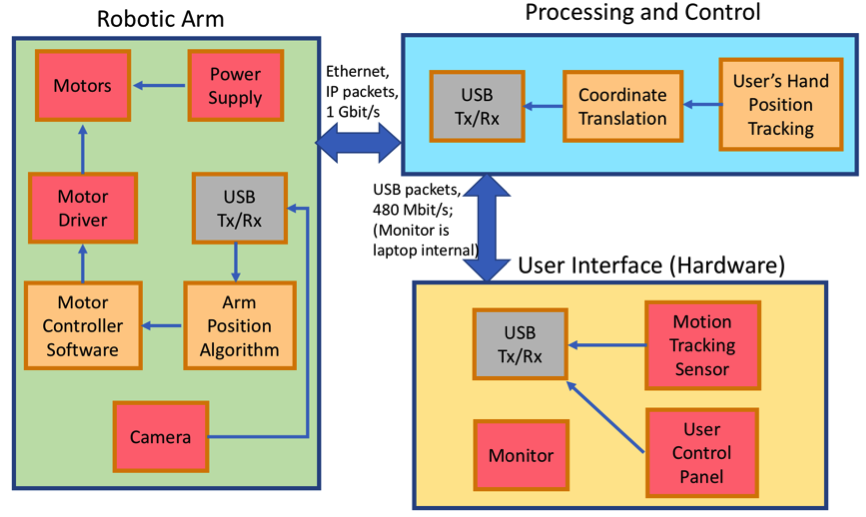
Arm
User Interface
Block Diagram
Meet the Team

Corey Ruderman
CSE
Dan Travis
CSE
Jacob Wyner
CSE
Joshua Girard
CS and CSE